图1, 2026 XbotPark具身智能研讨会
开篇

图2, 港科大教授、XbotPark机器人基地发起人李泽湘发言
位于松山湖的XbotPark机器人基地由李泽湘教授、高秉强教授、甘洁教授共同发起。自2014年成立至今,XbotPark体系已孵化超200家硬科技企业,覆盖智能家居、智慧农业、工业等多个领域,对机器人行业的发展方向有着深刻的洞察。
东莞市工信局、科技局、发改委等政府领导出席活动。研讨会集结了包括高校科研工作者、人形机器人整机企业、具身智能零部件企业、AI 大模型研发团队在内的数十家产业链主体,他们结合各自的产业实践,共同探讨了具身智能规模化商用的破局之道。
核心观点
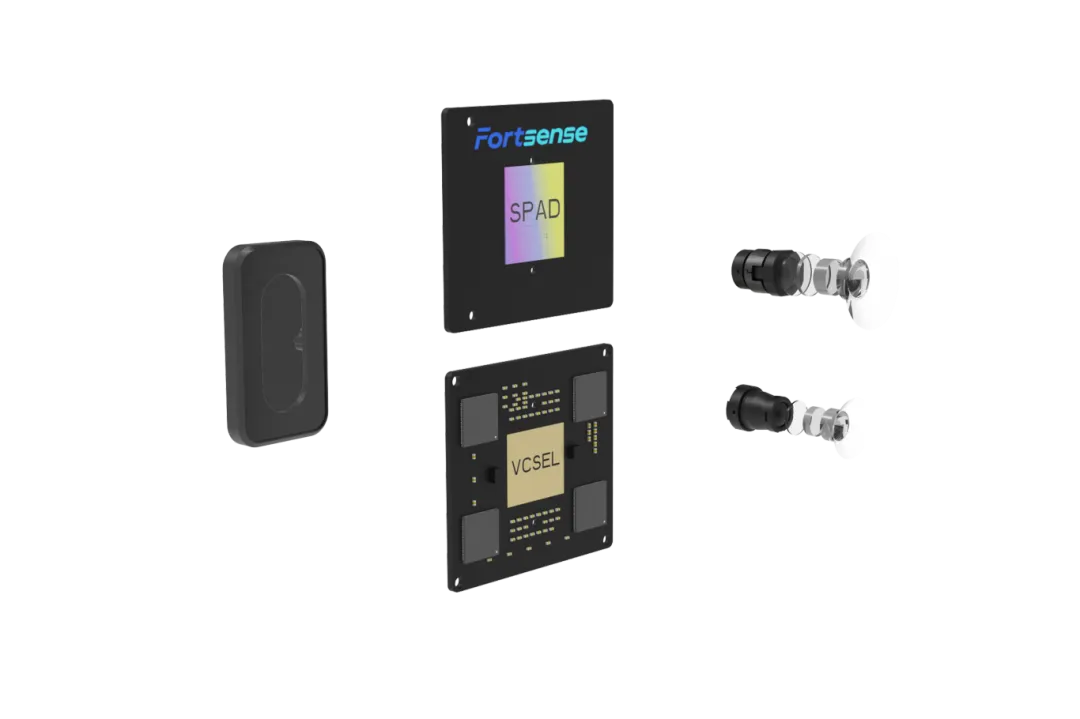
技术跃迁:首秀第二代SPAD-SoC系列,引爆现场热度
作为行业首家在乘用车量产的全固态激光雷达SPAD-SoC芯片供应商,阜时科技应邀出席研讨。公司副总经理林峰在会上发表主题演讲,深入剖析了“从数字AI到物理AI”的感知范式转移,并展示了阜时科技如何通过底层激光雷达芯片数据、摄像头图像数据和算法结合,创新解决机器人的精准位置感知及自主路径规划需求,实现全固态激光雷达从车用到具身智能线下AI落地使用的前景。
图3, 林峰介绍阜时科技RGBD空间相机一体化自主导航避障技术
技术解法
终局思维:RGBD空间相机重塑感知架构
针对物理AI对高精度、高可靠性感知的刚需,阜时科技给出的终极答案是:RGBD空间相机一体化自主导航避障技术。
阜时科技基于物理空间感知需求重新定义了机器人的“视觉小脑”:
- 架构创新(软硬一体化): 突破单一激光雷达局限,推出RGBD空间相机底层数据技术架构。该架构将3D深度感知(LiDAR)与色彩纹理(RGB)底层数据融合计算,实现了“感算一体”。
- 成本革命(规模化): 纯芯片化的设计大幅降低了硬件复杂度与生产成本,去除了昂贵的机械旋转部件。这一架构为人形机器人、工业AGV、服务机器人等大规模商业化铺平了道路,让高性能感知不再是奢侈品。
图4, 阜时科技RGBD空间相机一体化自主导航避障方案展示
产业展望
大湾区具身智能产业生态携手,加速“研发-量产”闭环
本次论坛汇聚行业共识,清晰勾勒出“物理AI”在工业生产、家用出行及消费娱乐等各行各业持续渗透的广阔蓝图。与会各方一致认为,具身智能产业真正适应物理AI场景并实现规模化落地,必须在机械运动、触觉视觉感知以及智能大模型等关键环节,加速研发出更具针对性的核心技术。


阜时科技有限公司
- 电话:0755-26907704
- 邮箱:public@fortsense.com
- 地址:深圳市南山区西丽街道深圳国际创新谷8栋A座44层

版权所有 © Copyright 2021阜时科技有限公司
备案编号:粤ICP备18121726号甘公网安备 62110202000092号